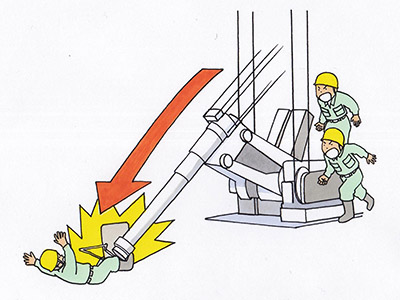
ロボットのモーターを取り外したところ、アームが動き、アームの先端を支えていたジャッキ台車とともに後方に転倒した
| 業種 | 製造業 | |||||
|---|---|---|---|---|---|---|
| 事業場規模 | 1000人以上 | |||||
| 機械設備・有害物質の種類(起因物) | 一般動力機械 | |||||
| 災害の種類(事故の型) | 激突され | |||||
| 被害者数 |
|
|||||
| 発生要因(物) | 作業方法の欠陥 | |||||
| 発生要因(人) | 職場的原因 | |||||
| 発生要因(管理) | その他の危険場所への接近 | |||||
No.101405
発生状況
| プレス工場内のライン間で材料を搬送するロボットのモーターが故障し、モーター単体での予備がなかったため、予備品置場に設置されたロボットから、同一型のモーターを取り外して使用することとなった。 作業者がモーター下部のボルト2本を外し、クレーンの非常停止ボタンの動作確認を行ったうえで、モーターの2箇所にワイヤーを巻き、シャックルとレバーブロックを用いてクレーンのフックに掛けた。更に、別の作業者がクレーンを操作して巻き上げを行い、ワイヤーが張った状態でクレーンを停止させた。被災者は、当該予備ロボットのアームの先端を、油圧ジャッキ式の台車を用いて支えていた。 その後、モーターを取り外していた作業者がモーター上部のボルト2本を外し、工具を用いて当該予備ロボットからモーターを引き出した。 モーターが抜けた瞬間、当該予備ロボットのアームが動き、ジャッキ台車が倒れ、ジャッキ台車を支えていた被災者は、左足が挟まった状態で後方に転倒し、床に後頭部を強打した。 |
原因
| この災害の原因としては、次のようなことが考えられる。 | |
| 1 | 搬送用ロボットのL軸からモーターを取り外したことによって、L軸が自由な状態になり、更に、ロボットに内蔵されたスプリングバランサーの作用によって、ロボットアームが前方(台車を設置していた側)に動いたこと。 |
| 2 | 作業指揮者であった被災者をはじめ、保全担当部署の者が、ロボットの構造について専門知識を有しておらず、各軸におけるロボットアームの動きを正確に把握していなかったこと。 |
| 3 | 搬送用ロボットのモーター交換作業における作業手順書を作成していなかったこと。 |
| 4 | 搬送用ロボットのモーター交換作業等の非定常作業を行わせる際の、安全衛生管理体制が徹底されていなかったこと。 |
対策
| 類似災害の防止のためには、次のような対策の徹底が必要である。 | |
| 1 | 搬送用ロボットのモーター交換作業を行わせるにあたり、ロボットの構造について十分な知識を有した労働者を作業指揮者として選任すること。 |
| 2 | 搬送用ロボットのモーター交換作業における作業手順書を作成し、労働者に対してその周知及び教育を徹底すること。 |
| 3 | 搬送用ロボットのモーター交換作業等の非定常作業における、各作業の連絡調整や安全パトロールを確実に実施し、工場全体の安全衛生管理体制を整備すること。 |